Blind robot dog can run, jump and climb in MIT's vision of the future (VIDEO)
Published 6 Jul, 2018 17:19 | Updated 30 Apr, 2020 05:27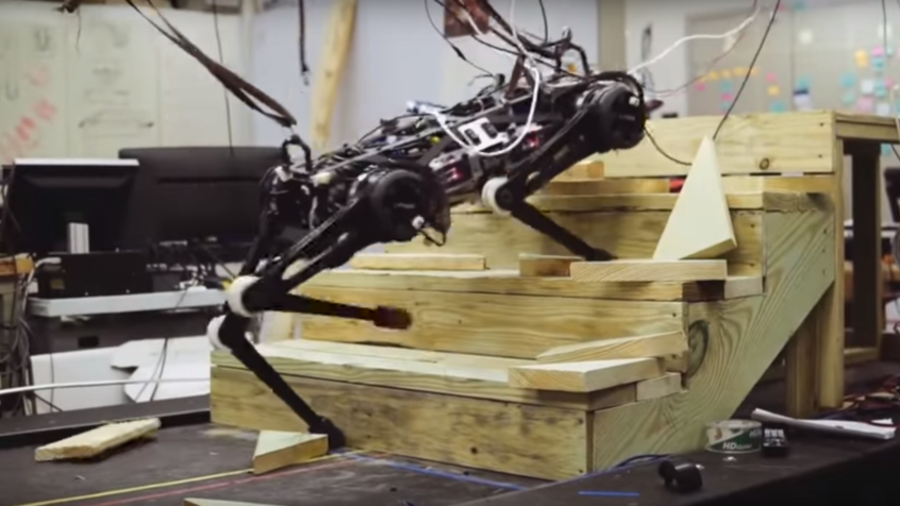
Seeing the Cheetah 3 robot from MIT leap, gallop and climb a staircase littered with debris is almost enough to make a person prepare to welcome our new animatronic overlords.
READ MORE: Pet project: Chinese RoboDogs on sale & ready to run on grass with you (VIDEO)
Footage of the experiments shows researchers from Massachusetts Institute of Technology (MIT) putting the Labrador-sized mechanical beast through its paces, making it run on a treadmill and climb cluttered steps while being periodically pulled sharply from behind with a leash.
The four-legged robot was tested without cameras or any external sensors, making the machine essentially blind. Designer Sangbae Kim believes that such experiments are essential to finding out what the robot is capable of without relying too much on vision.
“If humans close our eyes and make a step, we have a mental model for where the ground might be, and can prepare for it. But we also rely on the feel of touch of the ground,” Kim explained to MIT News. “We are sort of doing the same thing by combining multiple [sources of] information to determine the transition time.”
READ MORE: Humanoid robot Atlas nails perfect backflip (VIDEO)
The robot’s incredible balance can be credited to two new pieces of code, a contact detection algorithm and a model-predictive control algorithm which help the machine determine how to react to different types of terrain. “It’s thanks to that predictive control that can apply the right forces on the ground, combined with this contact transition algorithm that makes each contact very quick and secure,” Kim said.
READ MORE: Robot cheetah taught to jump obstacles using laser sight (VIDEO)
In 2015, footage of the Cheetah 2 robot showed the MIT-developed robot jumping over small obstacles with a 90 percent success rate. The previous incarnation of the robot relied on a visual system that used reflections from a laser to map terrain.
READ MORE: Buy your future overlord: Creepy robot dog SpotMini up for sale soon
The Cheetah is somewhat reminiscent of the SpotMini, another dog-like robot developed by Boston Dynamics. The company hopes to make the robot available commercially in 2019.
Think your friends would be interested? Share this story!











