Surgical robot to enter brain through patient’s cheek
Published 22 Oct, 2014 20:16 | Updated 22 Oct, 2014 20:15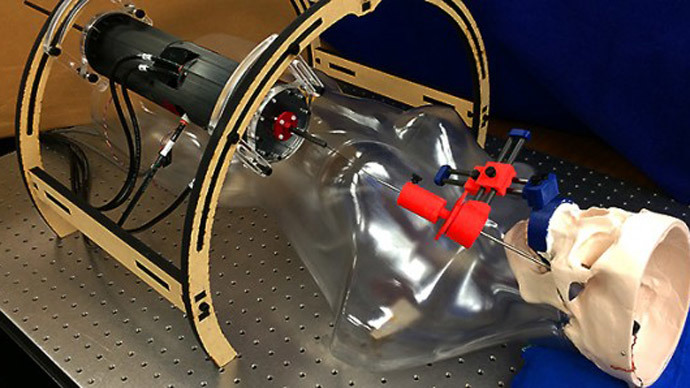
Researchers demonstrated a robot that will perform brain surgery to prevent epileptic seizures. During the procedure, the machine enters the brain through the cheek, making it a less-invasive option with a shorter recovery time than traditional surgery.
Eric Barth, the team leader and an associate professor in mechanical engineering at Vanderbilt University, and David Comber, a mechanical engineering graduate student who designed much of the machine, unveiled the prototype robot at the Fluid Power Innovation and Research Conference last week. The team performed a live demonstration of the surgical technique at the Nashville, Tennessee convention.

Entering the brain through a patient’s cheek is not a new procedure, as neuroscientists approach to implant electrodes in the brain to track brain activity and identify the location where the epileptic fits originate. But the the straight needles they use can’t reach the source region, so they must drill through the skull and insert the needle used to destroy the misbehaving neurons through the top of the head, the scientists said in a statement.
So the Vanderbilt engineering team decided on a new approach: Designing a shape-memory alloy needle ‒ that is, an alloy that can remember its original shape and return to it when heated after being deformed ‒ that can operate along a curving path. They also wanted the robot to be able to operate inside an MRI machine, which means it could not be made out of a magnetic metal because of the device’s strong magnetic field, CNET reported.
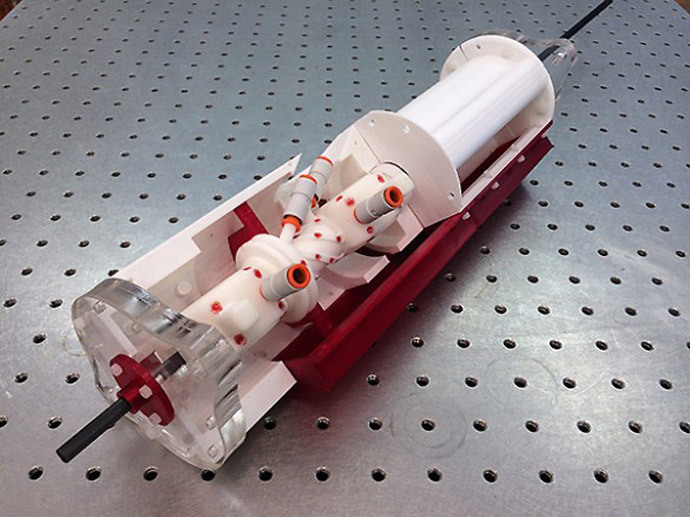
The prototype employs a 1.14 mm nickel-titanium needle that operates like a mechanical pencil. It has concentric tubes ‒ some of which are curved ‒ that allow the tip to follow a curved path into the brain. Using compressed air, a robotic platform then steers and advances the needle segments a millimeter at a time as it is tracked by the surgeon in progressive MRI scans, the scientists explained.
The project began five years ago, when Barth teamed up with another Vanderbilt associate professor of mechanical engineering, Robert Webster, to combine capabilities they’d already been working on separately.
“I’ve done a lot of work in my career on the control of pneumatic systems,” Barth said in a statement. “We knew we had this ability to have a robot in the MRI scanner, doing something in a way that other robots could not. Then we thought, ‘What can we do that would have the highest impact?’”
“The idea for this came about when Eric and I were talking in the hallway one day and we figured that his expertise in pneumatics was perfect for the MRI environment and could be combined with the steerable needles I’d been working on,” said Webster.
The two professors then identified surgery to prevent epileptic seizures as the ideal application after discussions with Joseph Neimat, a neurological surgery associate professor at the school.
Epileptic seizures originate in the hippocampus, a deep-seated region of the brain that is difficult to access by conventional means, MED Device Online reported. In the most severe cases, seizures cannot be controlled through medication, requiring surgery to stimulate, disconnect or remove that section of the patient’s brain. The current, high-risk procedure is long and invasive, that requires drilling into the skull. If the operation is successful, the patient then faces a three-month recovery period.
“The systems we have now that let us introduce probes into the brain – they deal with straight lines and are only manually guided,” Neimat said. “To have a system with a curved needle and unlimited access would make surgeries minimally invasive. We could do a dramatic surgery with nothing more than a needle stick to the cheek.”
Many of the components of the robot were made using 3D printing, which keeps the cost of the project low, the scientists said. They collaborated with Jonathon Slightam and Vito Gervasi at the Milwaukee School of Engineering who specialize in novel applications for additive manufacturing.
The project is now moving into the next stage of development, which is testing on cadavers, Barth said. He estimates the surgical robot could be in operating rooms within the next decade.











