Flying car? MIT’s new drone can fly, drive & communicate with other drones on its own
Published 26 Jun, 2017 23:41 | Updated 27 Jun, 2017 07:46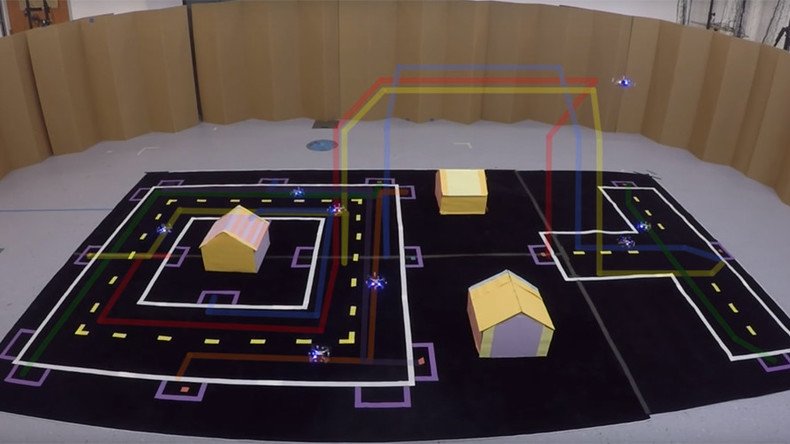
A team of researchers at the Massachusetts Institute of Technology (MIT) has developed a drone prototype that can autonomously shift from flying to driving. The innovation comes with high hopes for the long-awaited flying cars of the future.
By adding a driving platform to the bottom of a quadcopter drone, researchers at MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) announced on Monday they have developed a prototype that can autonomously switch between flying over obstacles to driving through tight spaces that normal drones could not get through.
“The ability to both fly and drive is useful in environments with a lot of barriers, since you can fly over ground obstacles and drive under overhead obstacles,” said Brandon Araki, lead author on the paper, according to the press release from MIT. “Normal drones can't maneuver on the ground at all. A drone with wheels is much more mobile while having only a slight reduction in flying time.”
While flying limits a drone’s battery life, driving is much more energy efficient. In their simulations, CSAIL was able to fly their drones for nearly 300 feet or drive them on a flat surface for 826 feet before the batteries ran out.
After attaching the two small motors with wheels to the bottom of drones, the team reduced the drone’s maximum flying distance by 14 percent. However, since driving takes less battery life, the drones ended up being even more efficient.
Personal drones no longer need to be registered with FAA, US federal court rules https://t.co/neKgkoG3BX
— RT America (@RT_America) May 20, 2017
The new drones were based on Araki’s previous work developing the “flying monkey” robot, which was able to fly, crawl and grasp objects. However, there was no way to make the drone travel autonomously.
In a new paper, Araki and a team of researchers at CSAIL developed "path-planning" algorithms to ensure that the drones avoid colliding into each other or any other obstacles. The drones were tested in a system that controlled the motions of eight drones flying and driving through a miniature town.
In their tests, researchers gave each of the drones a starting position and a goal position. Their scaled version of a town was complete with roads, buildings, no-fly zones and other obstacles. The multi-robot path planning system allowed the drones to communicate with each other and chose when to switch between flying and driving in order to optimize battery life, speed and efficiency.
The researchers were also able to restrict the drones from flying over certain areas, creating flight corridors that could become highways in the sky in the future. In the paper, the researchers said they envision a time when “flying taxis” could choose when to fly or drive based on how much a customer is willing to pay.
WATCH: MIT's new drone swarms can also drive. Could this be the future of flying cars? https://t.co/RWy5TGiCoJpic.twitter.com/nrWbkRiOif
— CSAIL at MIT (@MIT_CSAIL) June 26, 2017
CSAIL Director Daniela Rus said that creating flying cars did not involve simply “[putting] wings on cars,” rather it took years of research in giving flying drones the ability to drive.
“As we begin to develop planning and control algorithms for flying cars, we are encouraged by the possibility of creating robots with these capabilities at small scale,” Rus said, according to the press release from MIT. “While there are obviously still big challenges to scaling up to vehicles that could actually transport humans, we are inspired by the potential of a future in which flying cars could offer us fast, traffic-free transportation.”
No case against Kentucky ‘drone slayer,’ judge says https://t.co/DrRioGtYIFpic.twitter.com/QCO5Tjpx3w
— RT America (@RT_America) March 24, 2017









